项目概述
背景
随着电力规模快速发展,配电机房已成为该项目的枢纽,配电室设施设备是其中不可缺少的内容,对于电力的安全稳定运行起着重要的作用和意义。配电室的室内巡检工作在保证正常生产、安全运行方面起到了至关重要的作用,是站内运行维护过程中必不可少的环节之一。同时,随着自动化覆盖率的提高,室内安装了大量保护、测控,此类设备对于运行环境的要求更为苛刻。加强室内设备柜运行环境及柜内设备运行状况的管理,对于提高供电可靠性至关重要。
自动采集、远程操作是室内运维管控的重要工作,关系到变电设备的安全和变电系统的连续可靠运行,关系到为重要用户保电和其它用户可靠供电。传统的巡检方式采用人工巡视、手工记录模式。运行人员在现场巡视设备,依靠感观简单判断运行设备。这种模式与巡视人员对设备的熟悉程度、业务水平、工作经验、态度、责任心和精神状态有很大关系;故障抢修主要通过运维人员现场检查故障情况,搜索故障点需花费大量人力物力。这样的低效巡检与被动抢修工作,费时费力又无法准确获取信息,已经不能满足现代室内“自动化”、“精益化”运维的要求。
针对目前室内检测存在的问题,室内轨道式智能巡检机器人可代替人工检测,实现对室内连续不间断的实时监控,并可以自动读取和识别各被检信息的数据和状态,对故障情况进行实时分析。

图1 配电室现场图
系统方案
系统概述
本项目采用轨道式智能巡检机器人,搭载各类传感器对配电室实时监测,当检测到异常情况时,机器人可通过见光摄像机和红外热像仪自动获取现场图像﹐并上传到上位机发出报警信号;机器人检测数据还可自动形成报表、历史曲线存储于终端,可按时间、日期等条件查询筛选。此外除上述功能外,智能巡检机器人还具有实时采集现场图像、音频,自动巡检作业、自身故障检测、无线充电、安全防撞、自定义巡检模式等功能。
智能巡检机器人架构
轨道式智能巡检机器人系统为网络分布式架构,整体分为三层,分别为后台层、通讯层和终端层。终端层由轨道系统及机器人移动终端构成,通讯层由网络交换机、通讯线缆等设备组成,负责建立基站层与智能终端层的网络通道;后台包括服务器、后台软件、显示屏等设备。
系统支持集控模式,可通过集控中心对多个轨道式智能巡检机器人实现远程监控。
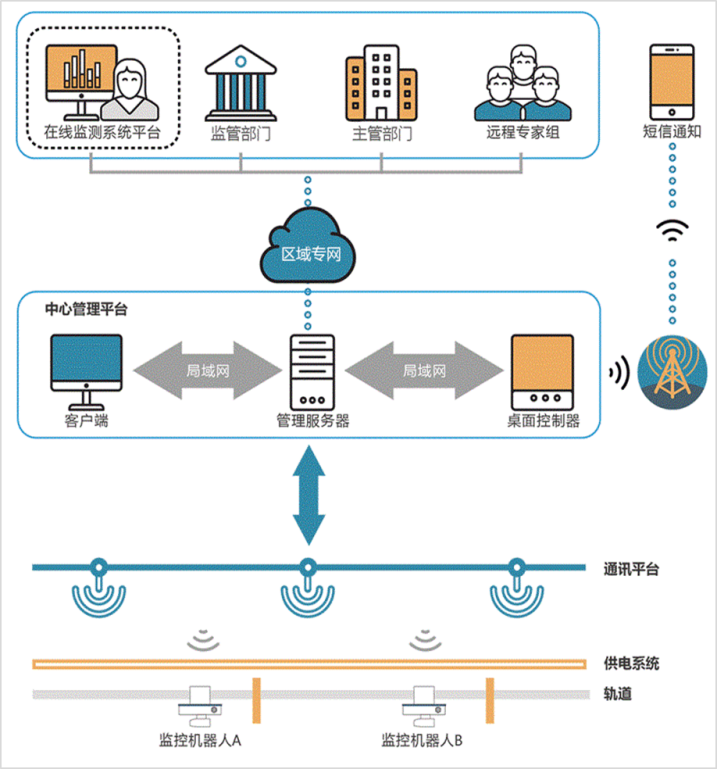
图2 系统架构图
在硬件配置上,终端层主要由检测组件、运动控制组件、双向语音组件、局放检测组件等组成;后台主要由双向对讲及后台服务器、显示器等硬件设备;连接两部分之间的为通信组件。
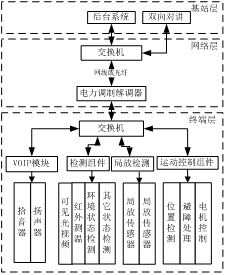
图3 室内轨道式智能巡检机器人硬件结构框图
室内轨道式智能巡检机器人系统与综合管理平台之间采用一定协议进对接。为了更好的挖掘室内轨道式智能巡检机器人系统的潜力,实现与其他子系统环境监控等多个在线监测系统的无缝融合,综合管理平台中有专门针对室内轨道式智能巡检机器人定制的智能联动业务模块,实现数据联动展示、系统联动智能分析、报警智能处理等业务。
巡检机器人系统功能
轨道式智能巡检机器人系统主要功能是替代目前传统的作业人员人工巡检作业模式,故该系统的巡检作业任务主要包括目前人员巡检的任务内容,即替代运检人员对配电室的巡检。
红外监测
红外热像仪可对室内设备进行高效的整体分析,而设备精确测温是对单一设备的精确诊断。设备精确测温功能尤其适用于下述设备和情况的精确监测:
(1)对于开关柜内易发热的关键设备,需要建立设备精确测温任务对其进行精确测温与监控;
(2)机器人在红外普测过程中检测到异常发热点时,将自动启动对该异常发热设备的精确测温,实施进一步的故障排查;
(3)设备检修投运后、新设备试运行期间内,对设备进行精确测温监控;
(4)系统输电线路过负荷等情况下,尤其需要对相应设备进行精确测温。
(5)精确测温时,机器人会从多个方位对设备的多个关键部分进行全面监控。
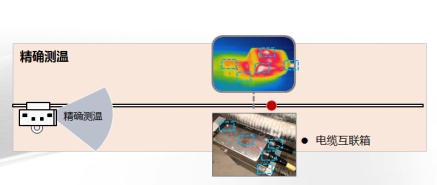
图4 特殊设备的精确测温示意图
系统可自动保存测温数据,形成历史分析曲线,和多样化的分析报表,便于运维人员对缺陷设备进行诊断分析。
视频监测
机器人挂载的视频成像系统包含热成像相机、高清可见光相机、高精度云台。
云台水平方向具备360°连续转动能力,垂直方向具备±90°转动能力,同时配合相机变焦,可有效保证对室内轨道式智能巡检机器人30米内各方向现场细节进行有效监控;同时云台自带减震装置,在室内轨道式智能巡检机器人运行过程中可减小振动,配合一体化防抖相机机芯,大大提高视频观测稳定度和可观测性;云台安装在室内轨道式智能巡检机器人底部,云台内可搭载可见光相机和红外热成像相机。
同时,该可见光一体化机芯具备防抖动功能,对振动有明显抑制作用。
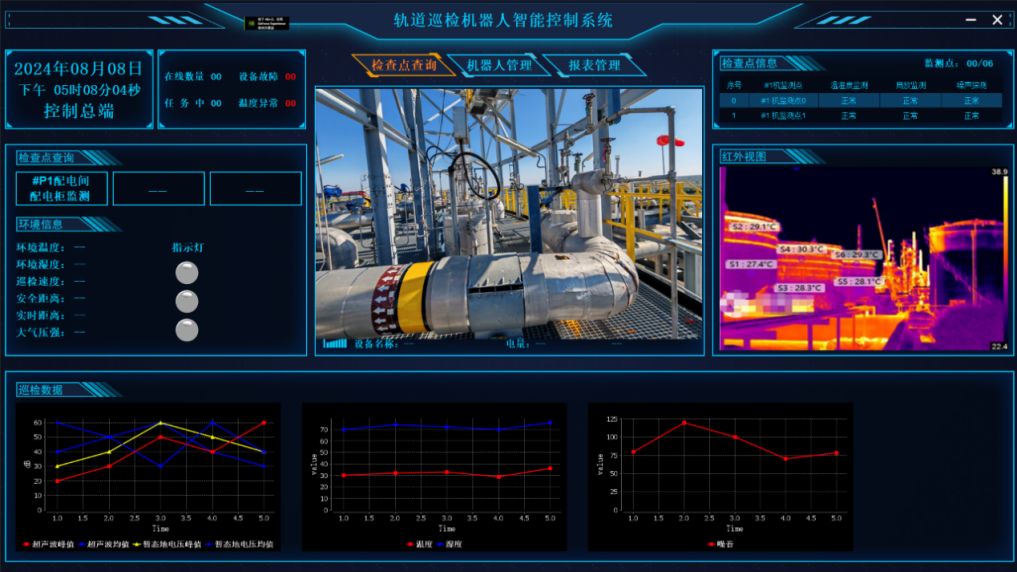
图5 机器人视觉识别示意图
局部放电监测
室内轨道式智能巡检机器人挂载局放传感器接收装置,能够接收分布于各室内的局放传感器,将传感器数据传输给后台系统,对室内的局放情况进行分析,做到对故障的提前预防。
烟雾、温湿度及空气臭氧量监测
室内轨道式智能巡检机器人能够对室内烟雾、温湿度、空气臭氧量实时在线监测。烟雾、温湿度、空气臭氧量等信息反映了室内环境情况,机器人可根据这些信息实时判断室内环境对人身和设备的安全隐患情况,并做出相应对策。
烟雾含量、臭氧含量监测具有自动归零校准,报警阈值可设定等功能。烟雾传感器可实现与风机的联动,当烟雾超出设定值时,可启动风机。
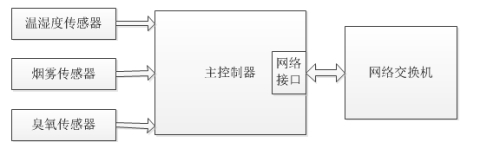
图6 传感器接入示意图
仪器仪表识别查抄
机器人配备高清摄像头捕捉仪表图像,系统通过图像识别技术自动读取仪表数值。仪表类型包括指针表(单层/多层刻度识别)、数显表(7段码/点阵显示识别),识别准确率>95%,系统能够自动识别并记录数值。
读取到的仪表数据与点检记录实时存储在本地数据库,确保数据安全性和可追溯性。
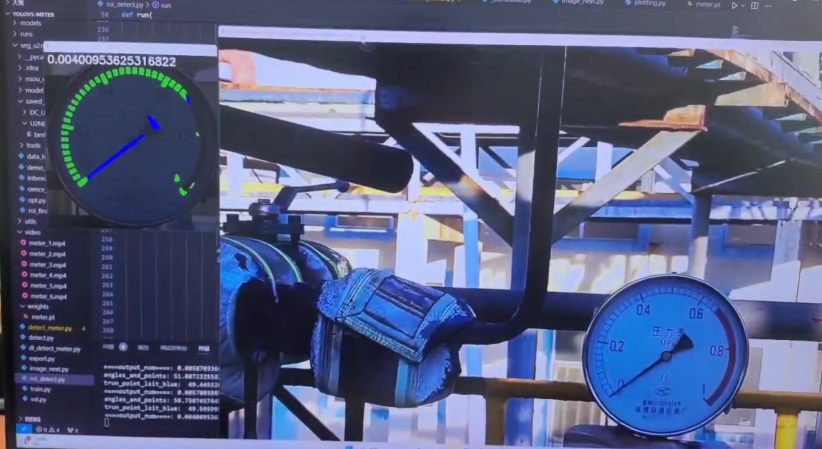
图7 仪表识别示意图
双向语音及告警
设备上安装有应急广播扬声器和监听麦克,并加装三色光报警器,在运行过程中,产生突发情况、发生故障或者遇到障碍时,发出不同的三色光报警。
应急广播及声光告警功能在如下情况下进行示警:
(1)现场发生异常情况,比如臭氧浓度超标、检测到烟雾等,室内轨道式智能巡检机器人通过警灯和音频系统报警,提醒现场人员做相应处理;
(2)远程中心管理平台,控制声光警告模块工作,提醒现场工作人员;
(3)在现场施工过程中,远程中心管理平台可对现场进行广播,或通过语音对讲对现场进行指挥;
(4)当现场出现非授权人员进入时,远程中心管理平台可通过语音对讲、广播进行警告和劝离。
警灯为三色灯,除了进行报警外,还可以指示系统的状态。
远程监控指挥
室内轨道式智能巡检机器人系统搭载双向语音系统,安装有应急广播扬声器和拾音器,用于监控中心和室内人员进行双向对讲,实现对现场的远程监控指挥。
多样化运行模式
(1)全自主例行巡检
例行巡检是室内轨道式智能巡检机器人在室内的日常运维工作中最常见的应用模式。机器人搭载高清摄像机、红外热成像仪、拾音器、臭氧传感器、烟雾传感器、温湿度传感器等多种检测设备和检测手段,通过轨道行走方式对室内以及辅助设备的外观检查、温度诊断等工作,并对室内的整体运行环境状态进行实时监测。并将巡检数据自动保存到系统后台,生成检测分析报告。
对比传统的人工例行巡检,机器人巡检不受高温、噪声等恶劣环境的影响,具有巡检频次高、巡检内容全面、工作量低、安全性可靠高的优势。
(2)人工遥控巡检
除机器人自动进行例行巡检外,还可以通过人工遥控巡检的方式对机器人进行实时遥控。该项应用模式适用于运维人员以及管理单位需要对某类设备的状态进行锁定与监测,尤其对于在机器人自主巡检过程中如检测到设备、环境状态异常并向运维人员告警时,运维人员可以在第一时间调用机器人快速到达设备现场位置,及时对现场设备进行查看并核实报警信息,以便迅速制定响应策略。
运维人员对机器人的遥控操作具有最大的操作优先级。系统进入遥控巡检模式后,机器人将中止正在执行的其他任务,按人工遥控指令实现机器人在可调速度下的前进、后退,云台的全方位旋转以及双视摄像机的镜头变倍调节,可保证系统在第一时间到达指定位置,获取设备与环境的状态数据与可视图像,提供后台进行决策指挥。
安全防撞功能
机器人前后装有超声波雷达,根据超声反射现象,内置微处理器采用中断方式完成测距计算,得到高精度测距结果,具有较高的实时响应能力,具备2.5米远的障碍物探测能力。在机器人运行过程中能够及时发现障碍物并做出相应动作。运行过程中,一旦发现前进方向2.5米内有障碍物即进行跟踪并发出警告,当障碍物进入0.5米范围内时则立即停车并告警,同时,配合结构上的柔性保护装置,以保障财产和人身安全。
巡检机器人介绍
机器人外观

图8 机器人外观示意图
机器人功能区说明
机器人功能区分为运动功能区、内部功能区、指示灯功能区以及开关报警功能区,各功能区具体说明如下:
(1)运动功能区
机器人运动功能区位置如下图所示,运动功能区主要负责机器人在轨道上的行驶,可完成直线及圆弧轨道的行驶。同时控制机器人在轨道上制定位置打卡测量、机器人在起始点及端点的换向启停等,机器人在运行过程中不需要对运动功能区进行人工操作。
(2)内部功能区
机器人内部功能区位置如下图所示,内部功能区主要负责机器人的整体控制及供电,同时提供机器人的充电的温度、气体检测及通讯等功能,机器人在运行过程中不需要对内部功能区进行人工操作。
(3)升降功能区
机器人升降功能区如下图所示。升降功能区由升降杆、局放传感器及摄像云台组成,负责机器人在指定任务点位置的升降、局放传感器的伸缩测量以及摄像云台的数据采集,机器人升降杆处设置固定插销,防止机器人在断电或不使用状态下升降杆下滑或错位,机器人在运行过程中不需要对升降功能区进行人工操作。
(4)指示灯功能区
机器人指示灯功能区位置如下图所示。指示灯功能区共分三色指示灯,红灯为通电指示灯,绿灯为运行/充电指示灯,黄灯为故障告警指示灯。
开机后红灯常亮,表示机器人已开机通电;正常运行过程中绿灯常亮;机器人充电时绿灯快闪,充电结束后绿灯恢复常亮状态;机器人监测到故障告警时黄灯闪烁,故障解除时黄灯恢复正常(熄灭状态),机器人在运行过程中不需要对指示灯功能区进行人工操作。
机器人开关报警功能区如上图所示。开关报警指示灯共两个开关及一个声光报警器,两个开关分别为电源开关和急停开关,电源开关控制机器人整体的启动,急停开关控制机器人的运行电机。
正常情况下急停开关处于常开状态,按下急停开关机器人停止运动,各项传感器仍正常工作;声光报警器在机器人监测数据达到阈值后发出声光报警,机器人在运行过程中不需要对声光报警器进行人工操作。
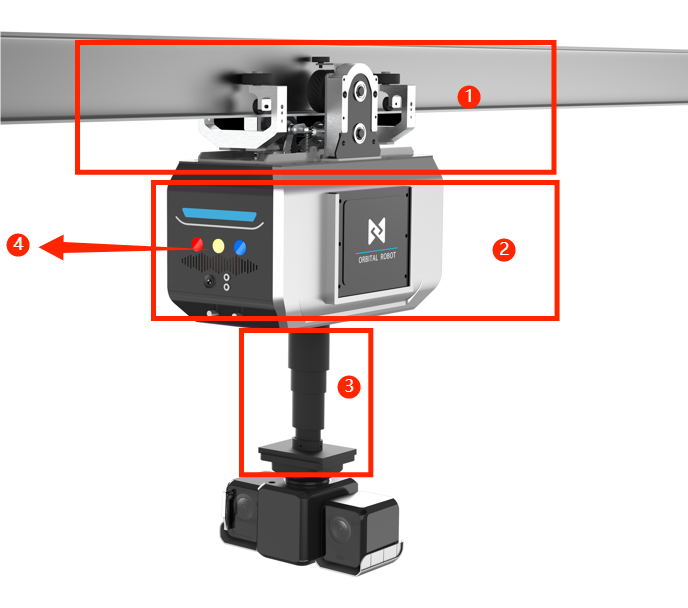
图9 机器人外观示意图
运行软件
软件简介
本系统软件是巡检机器人智能控制系统软件,该系统软件主要具备以下功能:机器人状态显示、视频红外监控、无线充电手动控制、机器人远程手动控制、导航设置(包括机器人运动控制、摄像头控制)、烟雾检测、温湿度检测、仪器仪表识别、局放检测、急停、声光报警、数据查询、报表生成及机器人设置等。
软件安装与卸载
该软件的兼容性较好,安装和卸载相对简便,下载软件安装包(或从设备资料包内查找“巡检机器人控制软件”),打开安装包,按照提示流程进行安装或卸载,或直接利用打包完成的已安装的软件,复制到对应的电脑位置,即可完成软件安装及卸载。安装完毕,桌面会出现该软件的快捷方式;卸载完毕,桌面快捷方式自动消失。
软件使用说明
5.3.1. 软件打开及关闭
软件打开:双击该软件的桌面快捷方式,即可运行并打开该软件。
软件关闭:单击主界面的右上角的“×”关闭按钮。
5.3.2. 界面介绍
界面介绍:打开后软件总共分为三个界面,分别是信息查询界面、机器人管理界面以及报表管理界面,界面具体内容介绍如下:
双击打开软件后,进入巡检机器人智能控制系统的主界面--“信息查询”界面,该界面主要由信息汇总区域、系统信息区域、指示灯区域、设备信息区域、检查点信息区域、可见光视频画面区域、红外视频画面区域以及气体检测数据折线图部分组成。如下图所示:
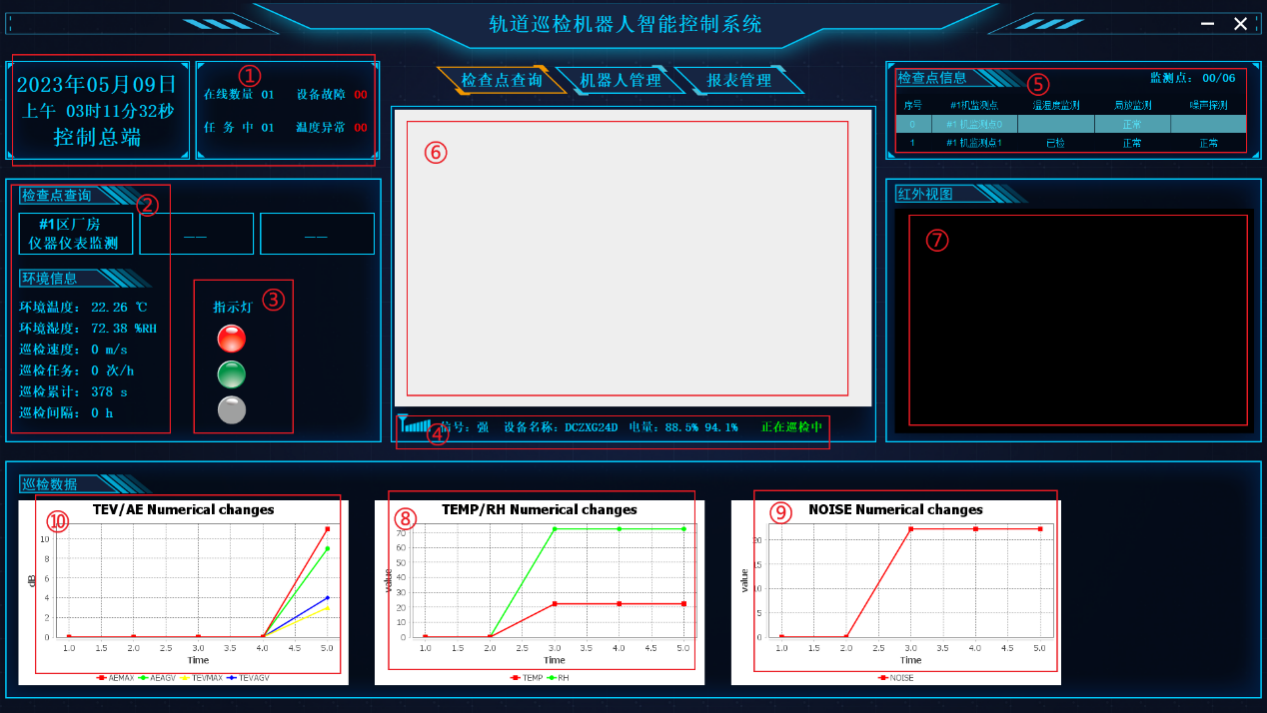
图10 机器人智能控制系统界面示意图
各区域具体说明如下:
①信息汇总:该区域显示当前时间、日期,在线设备数量、在执行任务设备数量、故障设备数量及数据异常数量。该区域不可操作。
②系统信息:该区域显示执行任务名称及系统信息,系统信息包括环境温度、巡检速度、巡检频次、巡检累计次数、巡检间隔等数据信息。该区域不可操作。
③指示灯:该区域显示当前机器人运行状态指示灯,指示灯分红、绿、黄三色,未连接前均为灰色,机器人连接后红色等常亮,表示机器人通电;机器人运行时绿灯常亮;机器人充电时绿灯闪烁;机器人故障告警时黄灯常亮,未告警时黄灯熄灭。该区域不可操作。
④设备信息:该区域显示机器人信号、设备名称、双电池电量等信息。该区域不可操作。
⑤任务点信息:该区域显示对应任务点的巡检数据,包括对应任务点设备状态及温度状态。该区域不可操作。
⑥可见光视频画面:该区域显示可见光摄像头监控画面、人脸识别结果以及设备点检结果。该区域不可操作。
⑦红外视频画面:该区域显示红外相机监控画面,以及红外相机视野范围内的最高温度及最低温度,同时显示视野范围内最高温度点。该区域不可操作。
⑧气体检测折线图:该区域显示气体监测数据实时折线图。机器人运行至对应任务点时,该区域自动跳转至该任务点气体监测数据实时折线图。该区域不可操作。
5.3.3. 机器人管理界面介绍
点击机器人管理界面,并输入密码进入,该界面主要实现机器人的控制以及系统设置。主要包括密码管理区域、机器人运动控制区域、云台控制区域、系统设置区域、人脸识别设置区域、任务点设置区域以及视频显示区域。界面如下图所示:
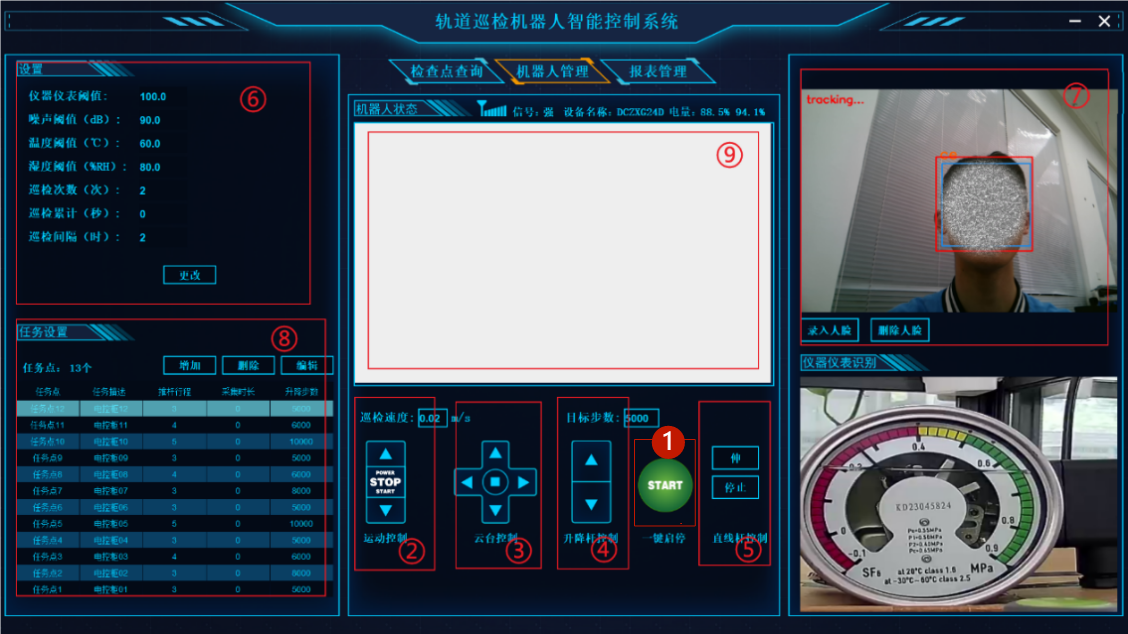
图11 机器人系统管理界面示意图
各区域具体内容如下:
①启停控制:采用一键启停按钮,达到快速启停的效果。
②机器人运动控制:该区域实现机器人的手动远程控制。机器人运行前通过输入“巡检速度”控制机器人运行速度,机器人默认运行速度为0.1m/s;点击“前进”或“后退”按键对机器人进行手动控制,点击“STOP”按键控制机器人停止。
③云台控制:该区域实现摄像云台的远程手动控制。点击四周按键分别控制云台左右上下旋转,点击中间按键手动控制云台拍照。
④升降杆控制:该区域实现机器人的升降杆远程控制。
⑤直线杆控制:该区域实现机器人的直线杆远程控制。
⑥系统设置:该区域实现报警阈值及巡检频次设置。点击“更改”按键进入编辑界面,手动输入温度、气体浓度报警阈值;输入巡检任务间隔,设定机器人相邻两次巡检作业间隔;输入巡检任务频次,设定机器人单次巡检任务中的运行次数,并点击“提交”完成设置。
⑦人脸识别:该区域实现机器人的人脸识别授予权限的功能。
⑧任务设置:该区域显示当前机器人巡检任务点及相关信息。
⑨视频显示:该区域显示当前监控视频。该区域不可操作。
5.3.4. 报表管理界面介绍
点击报表管理界面进入,该界面主要实现系统报表生成、报表查询及报表导出。主要包括报表内容区域、报表操作区域以及报表查看区域。界面如下图所示:

图12 数据报表示意图
各区域具体内容如下:
①报表内容:该区域显示设备名称、任务地点、任务名称、开机时间及巡检结果,巡检结果显示“正常”或“异常”,点击“人工复位”按键可将当前巡检结果清零。
②报表操作:该区域可通过选择时间,并点击“查询”完成对应时间的报表查询,或点击“显示全部”查看全部巡检数据;点击“报表导出”可将选定报表以excel表格型式输出值指定位置。
③报表查看:该区域可查看选定时间点的所有报表数据。数据包括时间、时间编号、事件名称、温度、表计识别结果、监测结果状态以及相应故障描述。



 首页
首页
 产品中心
产品中心
 新闻资讯
新闻资讯
 联系我们
联系我们