项目背景
随着工业 4.0 与智能制造的深度融合,工厂巡检场景正经历数字化转型。传统人工巡检存在效率低、覆盖范围有限、高危环境作业风险高、数据记录易出错等痛点,轮式智能巡检机器人应运而生。它凭借灵活移动能力适配工厂复杂场地,集成高清摄像头、红外热像仪、传感器等设备,可实现24小时不间断巡检,实时采集设备温度、噪声,人员安全措施检测等数据,通过AI算法分析异常并预警,大幅提升巡检效率与精准度,降低人力成本及安全隐患,成为保障工厂生产设备稳定运行、推动智能化管理的重要支撑。
传统巡检存在的问题
|
问题类别 |
描述 |
|
人力依赖重 |
长时间靠人工进行地毯式巡查,效率低、易疲劳 |
|
检测手段有限 |
主要依靠目测和人工读取表单,漏检率高 |
|
响应慢 |
夜间及节假日存在空岗或反应滞后 |
|
数据孤岛 |
巡检记录纸质化,难以实时共享或分析 |
|
安全风险高 |
人员进入高危区存在有毒气体中毒、火灾爆炸风险 |
|
突发情况反应滞后 |
遭遇危险情况,需人员优先撤离,难以第一时间完成数据采集、定位泄漏点等关键操作 |
项目实施必要性
为落实国家安全生产方针,提升工厂风险防控能力和应急响应速度,同时推进制造行业“数字化”“智能化”建设,项目引入轮式智能巡检机器人具有以下必要性:
提升巡检效率和准确率:通过多模态感知设备(热成像、气体检测、图像识别)替代人工,实现全面无遗漏监测。
构建风险预警机制:实现对气体泄漏、温度、设备异常的早期识别与自动报警。
保障人员安全:在危险环境中用机器代替人,最大程度减少人员暴露风险。
数据智能分析:打通感知-传输-决策-预警全链条,实现智能化管理闭环。
支撑应急联动体系:为火灾应急系统、DCS系统提供辅助判断与响应信息。
系统方案
智慧巡检架构设计
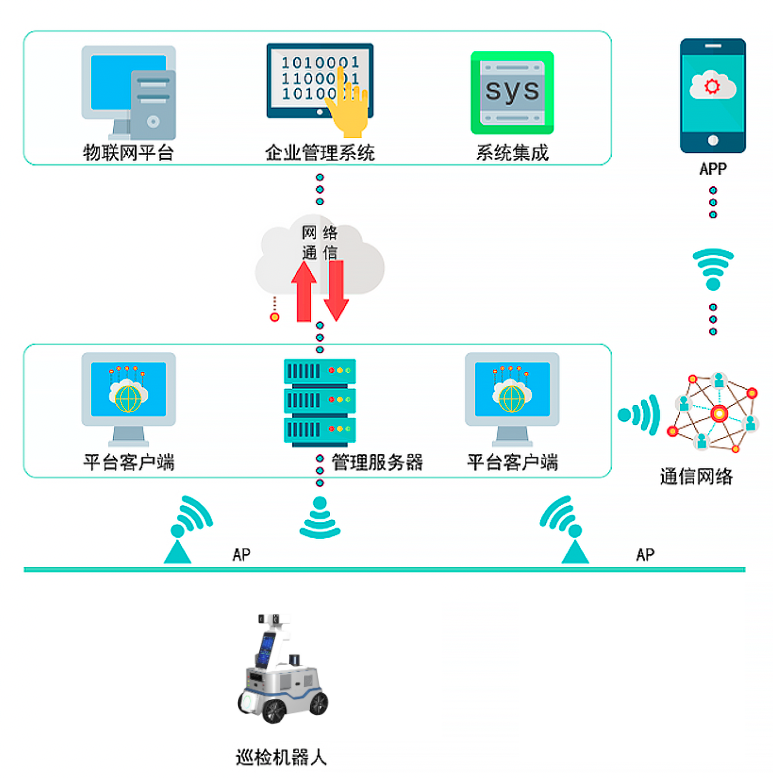
智能巡检机器人系统为网络分布式架构,整体分为三层,分别为后台层、通讯层和终端层。终端层轮式机器人和AI云台相机构成,通讯层由网络交换机、通讯线缆等设备组成,负责建立基站层与智能终端层的网络通道;后台包括服务器、后台软件、显示屏等设备。
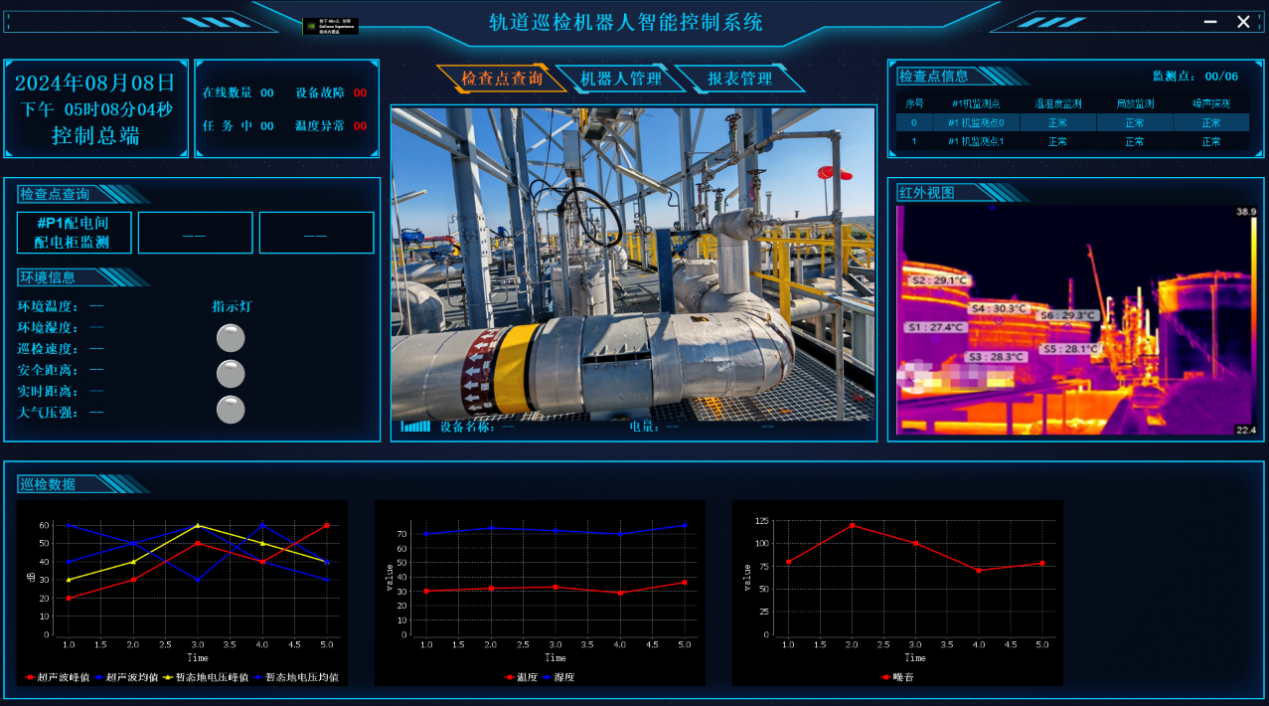
系统功能
视频功能
机器人搭载的视频成像系统包含热成像相机、高清可见光相机、高精度云台。
云台水平方向具备360°连续转动能力,垂直方向具备±90°转动能力,同时配合相机变焦,可有效保证对室内轮式智能巡检机器人30米内各方向现场细节进行有效监控;同时云台自带减震装置,在轮式智能巡检机器人运行过程中可减小振动,配合一体化防抖相机机芯,大大提高视频观测稳定度和可观测性;云台安装在轮式智能巡检机器人底部,云台内可搭载可见光相机和红外热成像相机。
同时,该可见光一体化机芯具备防抖动功能,对振动有明显抑制作用。
红外检测
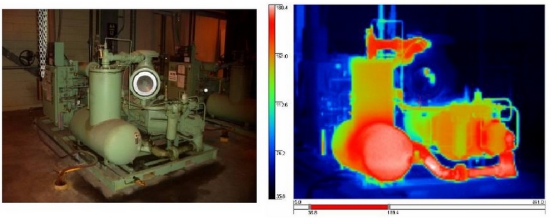
红外热成像功能是一项重要的技术,它通过检测物体表面的红外辐射来获取温度分布信息,帮助发现设备和设施的异常温度变化,从而预防故障和安全事故。在机器人巡检系统中,红外热成像功能可以用于设备、生产装置及周围环境的温度情况,提供更为精确和全面的巡检数据。
巡检机器人搭载红外热像仪,巡检机器人在对工艺装置区进行巡检过程中,热像仪可以安全及时的检测炉、罐、管道因高温、腐蚀等原因导致的泄漏状况,准确定位泄漏部位,帮助工作人员在第一时间正确修复故障。
机器人自主导航
自动巡航:机器人采用激光雷达及IMU复合导航模式,进行全路线高精度定位;在实时获取环境绝对位置的基础上,机器人既可依据设定的路线实现目标区域内部的全自动导航运动,亦可通过人员实现机器人的远程遥控。

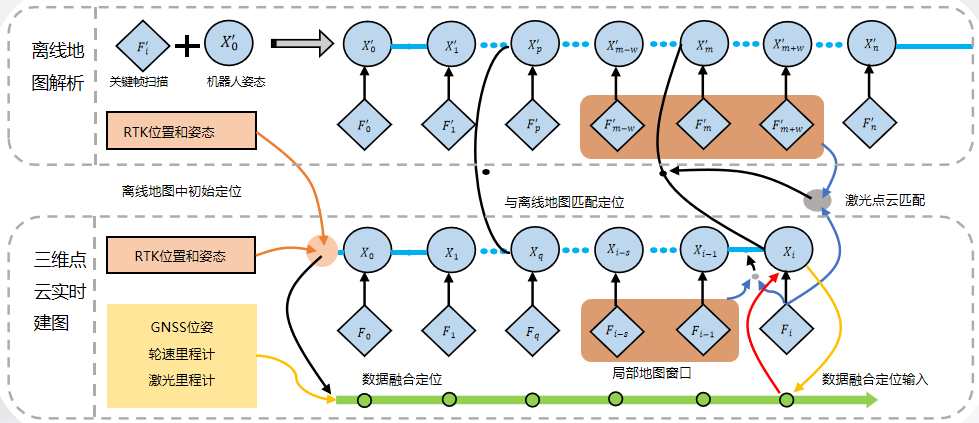
无网络路径规划算法
轮式巡检机器人无网络路径规划采用SLAM 同步定位与地图构建算法,结合激光雷达实时采集环境特征,同步生成局部栅格地图并完成自身定位;再通过启发式搜索算法,在构建的地图中规划最优巡检路径,同时动态避障,实现无网络环境下的自主导航与路径规划。
安全防撞功能
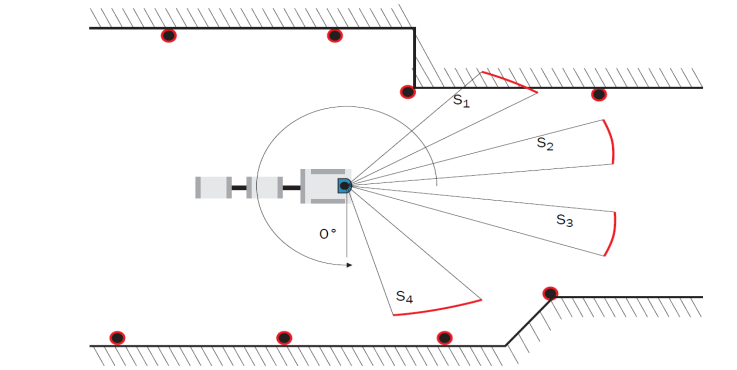
轮式机器人前后装有超声波雷达,根据超声反射现象,内置微处理器采用中断方式完成测距计算,得到高精度测距结果,具有较高的实时响应能力,具备2.5米远的障碍物探测能力。在机器人运行过程中能够及时发现障碍物并做出相应动作。运行过程中,一旦发现前进方向2.5米内有障碍物即进行跟踪并发出警告,当障碍物进入0.5米范围内时则立即停车并告警,同时,配合结构上的柔性保护装置,以保障财产和人身安全。
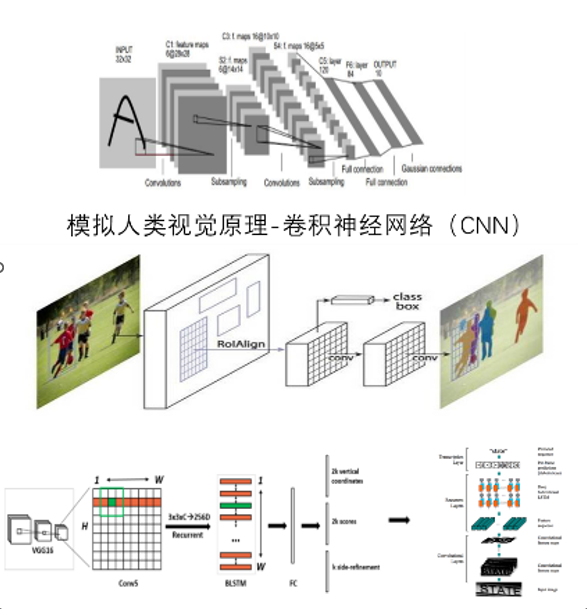
AI识别算法
公司拥有自主知识产权的AI算法系统,基于模拟人类视觉原理—卷积神经网络(CNN),利用机器学习和图像识别技术,对定点摄像头采集的数据进行分析,识别异常(如仪表读数超标)。根据AI分析结果,生成报警信息,并通过多种方式通知相关人员。
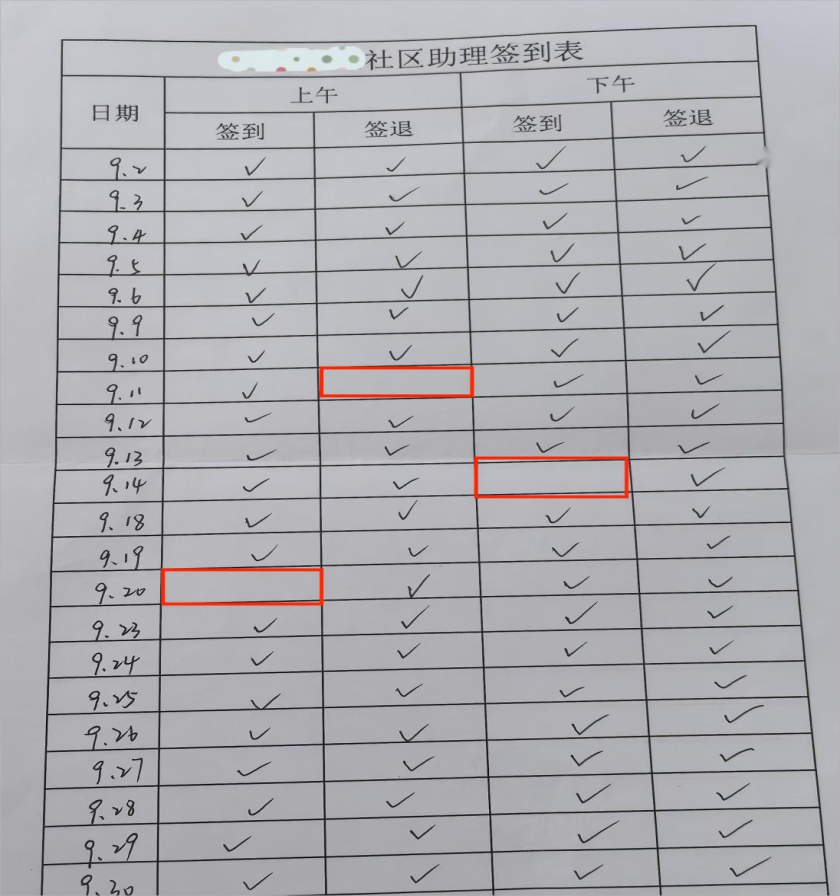
表单内容有无识别
表单识别通过OCR 算法进行表格内容检测与识别作用,对于表单内未填写任何信息、无勾选标记且无文字/数字记录的空白区域,OCR 算法会通过图像特征分析(如像素对比、轮廓检测),精准识别出这些空白部分,并将 “无内容” 的判定结果反馈至系统,为后续表单信息核验、数据统计或空白项提醒等操作提供可靠依据,大幅提升表单处理的自动化与准确性。
气体监测
轮式智能巡检机器人通过集成高灵敏度气体传感器,实现对厂区内环境的实时气体检测,主要监测氩气、可燃气体浓度。该功能可在无人巡检过程中及时发现泄漏风险、异常浓度变化,为厂区安全运行提供强有力保障。
环境温湿度监测
轮式巡检机器人搭载红外温度探测系统以及湿度探测仪,针对厂区环境及设备的温湿度进行实时监测,并将数据实时上传至后台,便于工作人员及时准确把控厂区环境及设备的实时温湿度。
噪声监测
轮式巡检机器人搭载噪声传感器,沿预设路线移动时,可实时采集车间内噪声数据,覆盖设备常规噪声、泄漏及摩擦异响等类型。通过算法比对实时数据与正常阈值,若发现异常,会触发本地声光报警,并上传异常位置、数据及时间戳至管理平台,通知运维排查,避免设备隐性故障引发事故。
人员安全帽、口罩佩戴监测
轮式巡检机器人在工厂车间、设备检修区等人员活动场景巡检时,凭借搭载的高清可见光相机与深度学习图像识别算法,可实时对人员防护装备佩戴情况进行精准检测。其通过海量工厂人员佩戴安全帽、口罩的样本数据训练模型,能快速捕捉画面中人员头部、面部特征,精准判断是否佩戴安全帽及口罩。若检测到未佩戴的情况,机器人会立即触发本地声光报警,同时将违规人员所在位置、实时画面截图、检测时间等信息上传至管理平台,提醒安全员及时上前劝导纠正,从源头降低人员作业安全风险。

积压品有无监测
轮式巡检机器人在工厂仓储及生产区域巡检时,依托搭载的高清可见光相机与自研图像识别算法,能精准对固定位置的货物堆放状态进行智能研判。其通过预先采集各区域 “正常无货” 基准图像并建立特征模型,在沿预设路线巡检过程中,实时捕捉目标位置画面并与基准模型比对,精准识别是否存在货物堆放。若检测到消防通道、设备操作区、应急出口等明确禁止存放货物的区域出现违规堆放情况,系统会立即触发本地声光报警,同时将违规位置、货物形态、拍摄时间等信息同步上传至工厂管理平台,提醒运维或仓储人员及时到场清理,保障厂区空间秩序与生产安全。

自主/人工遥控巡检
例行巡检是智能巡检机器人日常运维工作中最常见的应用模式。机器人搭载高清摄像机、红外热成像仪、气体传感器等多种检测设备和检测手段,通过对设备的外观检查、温度诊断等工作,并对设备区和罐区内的整体运行环境状态进行实时监测。同时,机器人在巡检过程中会通过搭载的可见光摄像头利用算法模型生成三维点云数据,给机器人提供详细的三维图像,使得机器人断网也可执行任务(本地存储≥128GB),并实时将巡检数据自动保存到系统后台,生成检测分析报告。
对比传统的人工例行巡检,机器人巡检不受高温、噪声等恶劣环境的影响,具有巡检频次高、巡检内容全面、工作量低、安全性可靠高的优势。
除机器人自动进行例行巡检外,还可以通过人工遥控巡检的方式对机器人进行实时遥控。该项应用模式适用于运维人员以及管理单位需要对指定物品或区域状态进行锁定与监测,尤其对于在机器人自主巡检过程中如检测到设备、环境状态异常并向运维人员告警时,运维人员可以在第一时间调用机器人快速到达设备现场位置,及时对现场设备进行查看并核实报警信息,以便迅速制定响应策略。
运维人员对机器人的遥控操作具有最大的操作优先级。系统进入遥控巡检模式后,机器人将中止正在执行的其他任务,按人工遥控指令实现机器人在可调速度下的前进、后退,云台的全方位旋转以及双视摄像机的镜头变倍调节,可保证系统在第一时间到达指定位置,获取设备与环境的状态数据与可视图像,提供后台进行决策指挥。

异常检测与报警
机器人后台系统对传感器数据、红外热成像数据进行实时分析。系统通过预设的阈值和算法,识别异常情况,如气体泄漏、温度异常等。
当系统检测到异常情况时,会自动生成报警信息。报警信息包括异常类型、发生位置、时间等详细信息,确保相关人员能够快速响应。
数据存储与报告
(1)数据存储
本地存储:所有巡检数据和视频监控数据都存储本地,确保数据的安全性和可靠性。存储系统具有高安全性和可靠性,支持数据的长期保存和随时访问。
历史数据查询:系统支持历史数据查询,管理人员可以随时调取历史数据,进行分析和回溯。历史数据的分析有助于发现长期趋势和潜在问题,提升管理效率。
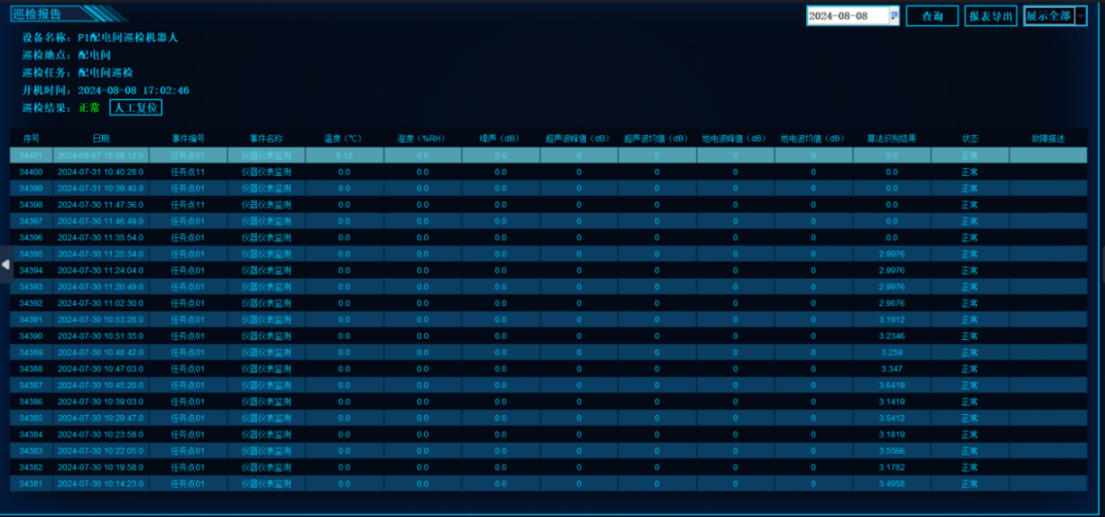
(2)巡检报告
定期报告生成:系统自动定期生成巡检报告,报告内容包括设备的运行状况、环境参数、异常情况和处理结果。巡检报告可以按日、周、月生成,满足不同管理需求。
自主任务调度
机器人系统具备智能任务调度能力,根据任务优先级和紧急程度,自动安排任务执行顺序和路径规划。
根据任务的重要性和紧急程度,系统自动设定任务优先级,确保紧急任务优先执行。系统支持多任务并行处理,能够同时执行多个操作任务,提高工作效率。根据实时环境变化和任务进展情况,系统动态调整任务调度和路径规划,确保操作的连贯性和高效性。
自我诊断与维护
机器人系统配备自我诊断与维护功能,能够及时发现和解决自身故障,保证系统的长期稳定运行。
通过内置传感器和诊断算法,实时监测机器人各部件的运行状态,及时发现潜在故障。一旦检测到故障,系统会立即发出报警,通知操作员进行检查和维护。部分故障可以通过系统自我调整和维护功能自动修复,减少停机时间和维护成本。
自主充电
轮式巡检机器人搭载电量监测系统,当检测到电量不足时,可自动规划路线返回充电房寻桩充电,也能通过远程控制实现一键返航充电,保障续航。



 首页
首页
 产品中心
产品中心
 新闻资讯
新闻资讯
 联系我们
联系我们