项目概况
项目背景
当前,罐区传统巡检模式主要依赖人工完成,受人工巡检的局限性影响,已难以满足现代化罐区精细化、全时段、高精准的安全管控需求。一方面,人工巡检存在覆盖盲区、响应滞后、夜间及恶劣天气巡检效率低等问题,对于泵体、阀门的细微跑冒滴漏、软管异响等隐蔽性隐患,易出现漏检、错检情况,且无法实现24小时不间断巡检,难以第一时间捕捉安全隐患苗头;另一方面,人工巡检难以对滴漏面积进行精准量化对比,难以判断隐患发展趋势,无法实现“防微杜渐”的安全管控目标。此外,罐区属于高危作业区域,人工巡检过程中,人员需接触各类设备及可能存在的常温气体泄漏环境,存在一定的安全风险,不符合“机器代人”的安全生产发展趋势。
系统方案
系统构成
通过轮式升降巡检机器人自主巡检,实现设备状态智能监控,数据智能采集、分析、报警等功能。针对设备区域,采用智能巡检系统进行设备巡检,并将巡检数据上传后台,发现异常时实时报警,实现设备区域无人值守,提高巡检质量和巡检效率,及时准确发现事故隐患,避免人员和经济损失。
采用“终端层—网络层—平台层—智慧算法层—交互层”五层架构模式。该架构将设备监测、数据传输、智能分析与应用展示高度融合,确保系统具备全覆盖监控、智能识别、实时预警、集中管理、辅助决策的能力。
(1)终端层(感知与执行单元)
终端层是整个系统的数据来源和执行基础,直接作用于输送设备与破碎机现场:
巡检机器人:巡检机器人搭载高清摄像头、红外热成像、激光测距和环境监测等模块,实现设备运行状态的全面检测。
控制与执行单元:含设备控制器、自动充电桩、局部报警器,确保机器人巡检任务高效执行,并支持现场应急响应。
(2)网络层(通信与传输保障)
网络层实现终端与平台之间的高速、安全通信:
局部网络覆盖:部署局域WiFi,实现现场监测数据和视频流的可靠传输;
冗余与安全传输机制:采用双通道冗余机制及VPN加密,确保数据传输的安全性与稳定性。
(3)平台层(数据处理与集成中心)
平台层是系统的核心,承载数据处理、管理和应用功能:
综合信息管理:集中展示设备运行状态、实时巡检信息、传感器监测结果;
视频与红外系统:接入多路高清视频与红外热成像数据,实时识别设备异常情况;
感知融合:通过算法融合视频、温度、声音等多源数据,提高异常检测准确性;
设备与系统管理:包含终端设备管理、云台控制、任务调度、权限分级管理等功能;
智慧报表:支持自动生成巡检与异常报表,具备记录查询、统计分析与趋势预测功能。
(4)智慧算法层(智能识别与决策支持)
智慧算法层是系统实现智能化和自主化的关键:
智能路径规划算法:优化巡检机器人运行路线,提高巡检效率;
智能识别算法:对火焰、跑冒滴漏、烟雾识别;
多模态融合算法:融合视频、热成像、声音与环境传感器数据,提升预警准确度;
大数据分析算法:基于历史巡检与运行数据,进行趋势预测与设备健康评估;
智能决策算法:在异常发生时,自动推送报警并提供应急处置建议。
(5)交互层(人机交互与可视化应用)
交互层面向管理与服务人员,提供友好直观的操作与展示界面:
客户端与Web平台:支持电脑端、移动端访问,便于不同角色随时掌握运行情况;
集控中心大屏:集中展示输送设备运行全景、实时视频、报警信息与统计分析结果;
多角色权限交互:根据用户权限提供分级信息展示与操作权限;
人机语音交互:支持语音指令,实现机器人任务下发、巡检结果播报,提高操作便捷性。

图 智能巡检系统架构图
机器人功能
核心适配罐区固定巡检区域,全面覆盖罐区泵体、阀门等关键设备,聚焦安全隐患精准识别、量化分析及分级预警,具体巡检功能如下:
基础巡检作业功能
机器人可按照预设固定巡检路线,在指定区域内实现自主移动、边行驶边巡检,无需人工干预即可完成全流程巡检作业,适配罐区设备密集、通道规范的场景,确保巡检覆盖无盲区、无遗漏。同时具备升降功能,可根据泵体、阀门等设备的高度灵活调整巡检高度,确保对不同高度的设备部件(如高处阀门接口、泵体顶部)均能实现近距离精准检测,解决人工巡检难以触及高处设备的痛点。
远程控制
通过人机交互终端控制机器人的运动,手动控制机器人巡检、停止,云台旋转、高清相机变倍、聚焦、光圈调整,并能远程控制智能巡检机器人拍摄照片。
急停功能
当机器人在运行过程中遇到紧急危险情况时,可手动触发机器人本体上的急停按钮,此时机器人能够迅速停止当前所有动作,避免造成进一步危害,直至急停释放复位,机器人重新工作。
无人自主巡检
在自主巡检方式下,机器人能接收后台的巡检任务计划,按照规划的路径执行任务。
离线巡检
机器人具备离线巡检功能,当现场网络中断或网络信号较弱时,仍然能够正常自动巡检,并且能够确保在离线巡检过程中的巡检数据不会丢失。
智能导航功能
机器人导航方式为SLAM 激光导航和SLAM 激光定位,采用16 线激光雷达,对采集到的周边环境的数据信息进行处理和分析,并将其转化为点云数据,通过算法将点云数据整合,构建出机器人周围环境的三维地图,地图中清晰的标识出障碍物、通道等信息,比对采集的数据与地图特征,确定自己在地图中的相对位置和姿态,实现相对定位。根据巡检任务和构建的地图,使用路径规划算法规划出从当前位置到目标位置的最优全局路径。
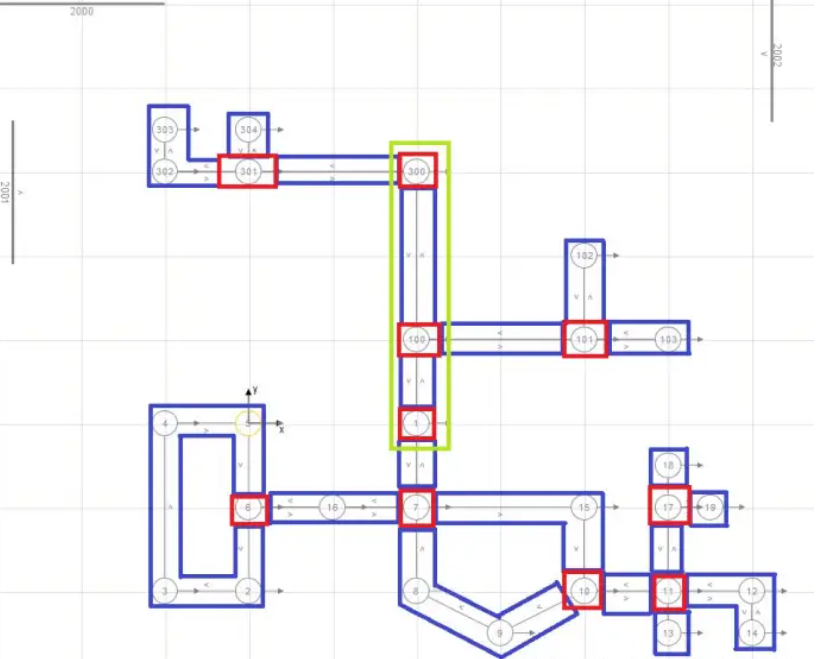
图 雷达导航示意图
巡检路线动态调整
机器人在接收到定制任务命令时,能立即停止正在执行的巡检任务。
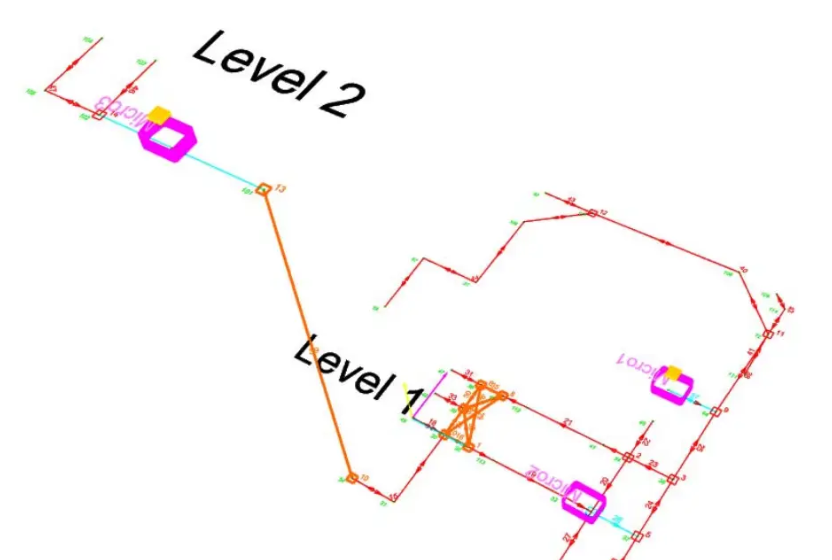
图 路径规划示意图
智能遇障功能
机器人搭载避障传感器,通过激光雷达、避障传感器实现安全运行,当机器人在巡检过程中在遇到障碍物时可以自动停止前进;当障碍物移除后,会根据既定路线继续开展巡检工作。
状态指示功能
机器人配置声光报警器,遇到异常情况时,发出报警声,同时配备红绿黄状态指示灯,在作业时提供机器人工作状态。
智能充电功能
巡检任务结束时,机器人将自动驶向充电桩实现自动连接并实施充电。充电完成后,自动停止充电,待命或投入正常运行。整个充电过程完全实现自动化,无需人工干预。
充电保护功能
为了保障充电过程安全可控,机器人实时监测充电电压电流,模块温度。当发生异常时,将自动停止充电。
自检功能
机器人具备自检功能,包括电源、驱动、通信、控制、检测模块、红外热成像仪、高清相机、电机、云台以及各种传感器等部件的工作状态,并能上传到后台,当发现异常可自动报警。
红外测温功能
机器人可对厂区内各类设备表面温度进行采集,对重点观察设备进行精确测温,并将红外图像及温度数据实时上传至巡检管控平台,对温度异常进行预警。最远识别距离≥20m,每次巡检任务准确率≥90%。
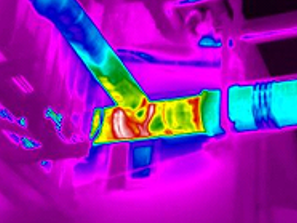
图 红外测温示意图
存储监控
机器人搭载高清摄像头,将巡检的视频画面及拍摄的照片同步存储到服务器中。存储视频、照片时间支持至少2个月,便于后期回放、查看。
安全防护机制
机器人具备防跌落能力,在面对环境中的沟槽、沟道、下落台阶、坑道、悬崖等危险地形情况时,机器人能够识别并做出运动响应并及时报警,不会发生机器人跌落、翻车等情况,保证机器人的运行安全。
机器人执行任务过程中,如遇障碍物阻挡或坑洞,能自动停障,并发出告警信号,避免站端无人情况下,机器人因环境变化而发生损坏;工作人员通过在地图上框选设置检修区域,机器人在任务调度及操控过程中就不会驶入检修区域;检修区域维护结束恢复正常后,工作人员在配置中取消即恢复机器人正常行进路线。
视频监控
机器人搭载的视频成像系统包含热成像相机、高清可见光相机、高精度云台。
云台水平方向具备360°连续转动能力,垂直方向具备±90°转动能力,同时配合相机变焦,可有效保证对轮式升降巡检机器人30米内各方向现场细节进行有效监控;同时云台自带减震装置,在轮式升降巡检机器人运行过程中可减小振动,配合一体化防抖相机机芯,大大提高视频观测稳定度和可观测性;云台安装在室内轮式智能巡检机器人底部,云台内可搭载可见光相机和红外热成像相机。
同时,该可见光一体化机芯具备防抖动功能,对振动有明显抑制作用。
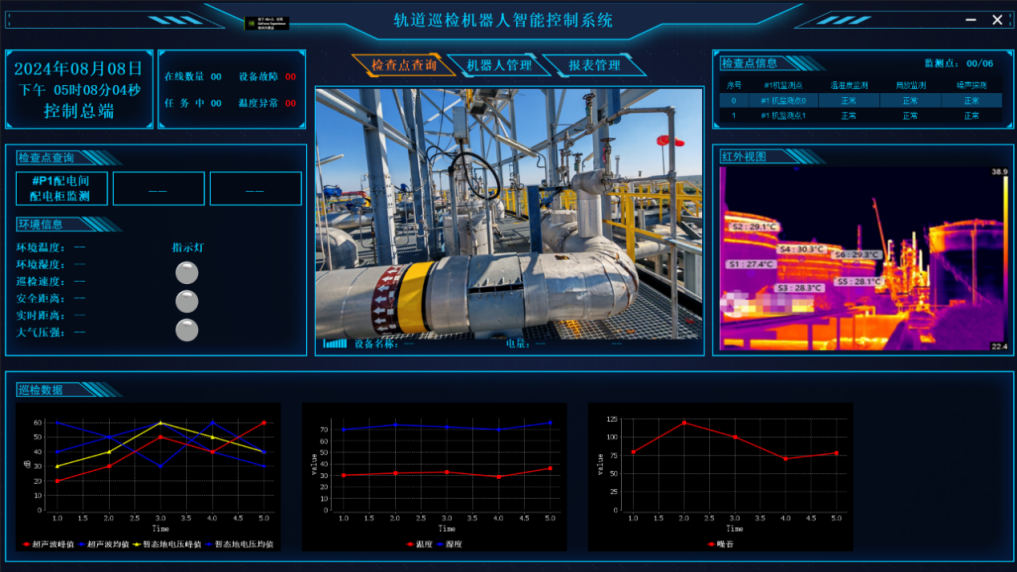
图 机器人视频监控画面
后台管理系统与拓展对接功能
轮式巡检机器人系统围绕实时监控、设备状态监控、机器人控制管理、数据统计分析、报警信息管理及用户权限管理等核心界面构建,各模块功能互补、协同运作,共同组成一套覆盖机器人控制全流程、数据决策全维度的完整且高效的机器人管理解决方案。以下对各界面展开详细说明:
机器人列表
该机器人控制系统界面是用户管理机器人的核心操作窗口,集中展示在线机器人数量、异常机器人数量、系统状态、今日巡检次数等全局信息,以及各机器人的详细信息,帮助用户直观掌握机器人的整体部署情况与个体运行状态,对多台机器人的高效管理与操作。
主要功能包括:
- 全局状态概览:展示在线机器人数量、异常机器人数量、系统运行状态(如正常)及今日巡检次数,让用户快速掌握系统整体运行概况。
- 机器人信息查看:每个机器人条目展示其状态、电量等详细信息,帮助用户实时了解个体机器人的运行情况。
- 机器人操作管理:针对多个机器人提供操作按钮,支持用户对机器人进行精细化的管理与控制操作(如切换机器人)。
- 系统状态监控:通过系统状态标识(如正常),实时反馈系统整体运行健康状态,让用户及时知晓系统层面的状态变化。
实时监控
该界面是机器人视觉监控与任务管理的核心操作窗口,集中展示机器人双摄像头(可见光 + 红外)实时画面、机器人状态信息等关键数据,帮助用户直观掌握机器人的视觉巡检情况与系统运行状态,实现对机器人视觉监控与任务执行的高效管理。
主要功能包括:
- 双摄像头视频监控:实时传输机器人可见光摄像头和红外摄像头的画面,支持用户同时观察现场常规景象与环境热分布情况,全面掌握巡检区域状况。
- 巡检、环境、机器人、小车相关信息:实时显示传感器数据与机器人、小车、巡检相关数据,便于用户对机器人情况进行及时的调整与规划。
- 机器人状态管理:右侧面板展示机器人的状态信息。
- 实时报警记录:显示机器人设备及环境等异常,便于用户及时处理。
机器人控制
该界面是机器人远程操控与实时监控的核心操作窗口,集中展示机器人实时摄像头画面、运动控制按键、机器人状态信息等关键内容,支持用户远程对机器人进行精准运动操控、视角调整及状态监控,实现对机器人的灵活控制与信息的实时掌握。
- 实时视频监控:展示机器人摄像头可见光的实时画面,便于用户直观观察机器人所处环境的现场情况。
- 机器人状态信息:左侧面板展示机器人状态等详情,实时掌握机器人的当前情况。
- ①⑦⑧视角与功能控制:支持对机器人摄像头视角(上下左右、对角移动)进行精细化控制以及聚焦、调焦等功能,满足不同场景下对机器人观察视角的需求,还提供重连、全屏、拍照、录像等功能。
- ②机器人运动控制:首先设置速度,提供方向控制按键,实现对机器人轨迹的灵活操控。
注:建议初次使用速度设置为0.01,确认机器人行进方向后,可再次调整速度。
- ③④多功能辅助工具:包括报警、黄灯、充电等功能。
- ⑤前往巡航点:首先选择任务点,其次点击 “去巡航点” 快捷按钮,即可操作机器人前往巡航点。
- ⑤自动巡检:首先选择任务方案,其次点击 “一键巡检” 快捷按钮,即可操作机器人进行自动巡检。
- ⑨调试工具面板:点击打开调试面板按钮,弹出抽屉界面,显示机器人的多种操作按钮,比如继续导航、终止导航、风扇等,如图 34 机器人控制调试工具面板所示:
- ⑥任务设置:在右侧面板任务列表区域进行增删改,可对任务信息详细添加修改,具体字段信息。
机器人管理
该界面是机器人管理的核心数据窗口,以列表形式集中展示机器人多维度信息,支持用户对机器人信息进行查询、管理,便于全面掌握机器人的配置与关联情况。
- 机器人信息列表:展示机器人编码、名称、各类IP、端口等详细信息,让用户直观了解每个机器人的关联配置与状态。
- ①查询筛选:提供机器人编码、名称的搜索框及重置功能,支持用户快速筛选目标机器人信息,提升查询效率。
- ②管理操作:针对每条机器人信息提供操作选项,支持用户对机器人进行精细化管理(如编辑、查看详情等)。其中,编辑和删除功能非必要尽量不使用,在机器人测试过程中,工程师已配置准确。
- ③新增机器人:界面右上角点击新增机器人按钮,方便快捷地设置机器人信息添加进来,进行统一管理。
导航管理
该界面是导航管理的详细操作窗口,支持对小车进行建图、导航等操作,具体详细操作如下图。
①节点控制:
- IMU节点打开会有小车数据,若不打开没有小车数据;
- 电机节点不打开电机会锁住,由算法操作即导航失效,若软件由UDP调,则不会锁住;
- 雷达节点是开启雷达;
- 建图节点是开启建图;
- 定位节点是小车定位用的,一般在定点导航会打开;
- 导航节点是开启导航;
- 巡检节点是开启巡检。
②③建图定点功能:
- 1.在建图时打开IMU、电机、雷达节点,建完图后再打开定位、导航节点即可;
- 2.点击开始建图;
- 3.建完图后,一定需要定0点和充电点(充电点就让小车回到充电点,再定点;0点是在充电点的前1m处,直接点前进1m,再定0点)。
④导航功能:输入导航点编号,开始导航即可。
⑤智能充电:在0点发送指令可以回到充电点进行充电;若充电点已定点,就可以直接发送回到充电点。
任务方案
该界面是任务方案的详细配置窗口,支持对机器人设置相关任务方案,对任务方案核心参数进行编辑,满足任务方案动态调整与新增的需求。
- ①查询筛选:提供任务方案编码、名称的搜索框及重置功能,支持用户快速筛选目标机器人及任务方案信息,提升查询效率。
- ②基础信息配置:可对机器人对应的任务方案进行管理,如编辑、查看任务列表、删除等关键操作,实现任务列表配置的灵活调整。
- ③新增任务方案:界面右上角点击新增任务方案按钮,方便快捷地设置机器人对应任务方案信息添加进来,进行统一管理。具体参数字段如图 新增任务方案界面所示,填写任务方案基本信息,选择任务列表,即可添加任务方案。
任务点报表
该界面是机器人任务点的集中报表窗口,以列表形式展示任务点的机器人编码、任务编码、巡检位置及各类环境参数,支持多维度筛选与数据导出,便于用户全面掌握任务点的巡检数据与环境状态,为巡检分析与决策提供数据支撑。
- 任务点数据展示:展示机器人编码、任务编码、巡检位置、CO₂(ppm)、CO (ppm)、温度 (℃)等详细信息,通过颜色标识(绿 / 红)直观呈现各环境参数的达标状态,帮助用户快速识别异常数据。
- ①多维度筛选查询:提供“任务编码”“时间范围”“数据状态” 等筛选条件及 “展开高级搜索”“搜索”“重置” 功能,支持用户精准定位目标任务点数据,提升查询效率。
- ②数据操作与③导出:操作列提供 “查看详情” 功能,支持用户深入了解任务点的具体数据,包括下载红外光、可见光图片、添加算法识别操作,如图 机器人任务点列表报告详情界面所示;界面支持 “导出 Excel”,便于用户对任务点数据进行离线分析与存档。
算法识别记录
该界面是机器人算法识别记录的集中管理窗口,以列表形式展示算法识别任务的关键信息,支持多维度筛选与数据导出,便于用户全面掌握算法识别的执行情况、结果与状态,为算法识别的分析与优化提供数据支撑。
- 识别信息展示:展示机器人编码、任务编码、标题、识别类型、识别结果等详细信息,直观呈现每一条算法识别任务的执行情况与结果。
- ①多维度筛选查询:提供“任务编码”“识别类型”“识别状态” 等筛选条件及 “搜索”“重置” 功能,支持用户精准定位目标算法识别记录,提升查询效率。
- ②操作与③数据导出:操作列提供 “查看详情” 功能,支持用户深入了解算法识别的具体信息;界面支持 “导出 Excel”,便于用户对识别记录进行离线分析与存档。
巡检记录
该界面是机器人巡检记录的集中管理窗口,以列表形式展示巡检的记录编码、机器人编码、状态、异常情况、时间进度等关键信息,支持多维度筛选与数据导出,便于用户全面掌握巡检任务的执行情况、状态与异常信息,为巡检分析与管理提供数据支撑。
- 巡检信息展示:展示巡检记录编码、机器人编码、巡检方案编码、巡检状态(如已完成、已中断)、算法识别是否异常、环境数据是否异常、是否超时等详细信息,通过颜色标识(绿 / 红)直观呈现巡检状态与异常情况,帮助用户快速识别异常巡检任务。
- ①多维度筛选查询:提供“巡检方案编码”“展开其他筛选条件” 等筛选功能及 “搜索”“重置” 按钮,支持用户精准定位目标巡检记录,提升查询效率。
- ②操作与③数据导出:操作列提供 “查看详情”“查看巡检报表” 功能,若巡检记录有异常,可下载可见光/红外光视频去查看,支持用户深入了解巡检记录的过程,如图 机器人巡检记录详情界面所示;界面支持 “导出 Excel”,便于用户对巡检记录进行离线分析与存档。
报警记录
该界面是机器人环境数据报警的集中管理窗口,以列表形式展示环境数据报警的关键信息,支持多类型报警切换、筛选查询与数据导出,便于用户实时掌握环境异常报警的发生情况、处理进度,实现对环境报警的高效管理与跟踪。
- 报警信息详情展示:列表展示机器人编码、任务编码、报警类型、报警编码、报警信息、状态(已处理 / 未处理)、确认操作等详细信息,直观呈现每一条环境报警的触发原因、处理状态与时间节点。
- ①多类型报警切换与筛选:支持 “机器人报警”“环境数据报警”“算法识别报警” 标签页切换;通过“任务编码”进行筛选,快速定位目标报警信息。
- ②报警处理与③数据导出:提供 “确认” 操作按钮,可对未处理环境报警进行处理;支持 “导出 Excel” 功能,便于环境报警数据的离线分析与存档。
用户管理
该界面是机器人人员系统的用户管理窗口,以列表形式展示用户的用户名、类型、状态等关键信息,支持多维度查询筛选与分页管理,便于用户对系统用户进行身份识别以及权限配置,实现用户的高效运维。
- 用户信息列表:展示用户名、用户类型、密码、权限类型等详细信息,直观呈现用户的身份与权限配置情况。
- ①查询筛选:提供 “用户名”“用户类型”“权限类型” 等搜索条件进行搜索、重置,支持快速定位目标用户,提升用户信息查询效率。
- ②新增用户:界面右上角点击新增用户按钮,方便快捷地将用户信息添加进来,进行统一管理。
- ③用户操作:操作列支持对用户进行编辑等操作,满足用户权限与状态的维护需求。
系统拓展与对接
系统基于Windows系统环境开发,B/S架构,具备综合看板管理、基础信息管理、巡检业务管理、实时预警管理、机器人管理、数据采集与分析和系统管理功能。
系统具备可扩展性,开放API接口,便于与其他管理系统对接,可接入其它业务系统并实现数据传输和系统联动,系统能够提供多种接口或工具,以便集成不同来源的工程信息,提供强大的数据采集和集成能力,工业标准支持OPC、BACNet、Modbus等协议;HTTP信息化接口支持Web API、WebService、XMPP等协议;物联网即时通讯协议支持MQTT等协议;数据库接口支持ODBC等标准。



 首页
首页
 产品中心
产品中心
 新闻资讯
新闻资讯
 联系我们
联系我们